-
 Publications
Publications
-
 Research activities
Research activities
-
Hybrid mobile hydraulics for excavators
-
Lubricating Systems with Rotating Shafts
-
0D models of axial piston pumps/motors
-
CFD studies on conical poppet valves
-
CFD analysis of gerotor pumps
-
Lumped parameter models of crescent pumps
-
Lumped parameter models of vane pumps
-
Lumped parameter models of gerotor pumps
-
Coupled simulation of telehandler hydraulics
-
Modelling of brake booster vacuum pumps
-
Absorbed energy in ICE lubricating pumps
-
 Multi-body simulation of axial piston pumps
Multi-body simulation of axial piston pumps
-
Development of variable flow lubricating pumps
-
Optimization of ICE lubrication gerotor pumps
-
-
Research projects
Multi-body simulation of axial piston pumps (2003-2006)
Analysis of a variable displacement axial piston pump, as in other complex fluid power and mechanical systems, requires appropriate insight into three multidisciplinary domains, i.e. hydraulics, mechanics and tribology. Over the years, at FPRL, modelling of axial piston pumps has been evolved in AMESim (currently Simcenter Amesim) where a three dimensional mechanical approach required generation of proprietary libraries leading to the evaluation of internal forces/reactions in all pump subsystems. Tribological aspects in axial piston pumps modelling were also investigated but AMESim, in this respect, did not appear as the appropriate computational environment. Consequently, a new approach was initiated grounded on MSC.ADAMS. The model was developed through proprietary macros that automatically originate all pump subsystems parametrically and further apply required constraints and forces (springs, contacts and pressure forces). The ADAMS environment was also selected due to co-simulation capabilities with AMESim. A comparison between simulated and experimental steady-state characteristics of the axial pump was also performed. As such this study indicated an innovative methodology for the analysis of complex fluid power systems in the hope that, eventually, tribology will also fit into the scene.
AMESim solved state equations pertinent to the hydraulic model and gathered from ADAMS, that processed mechanical state equations, results of the multibody model at fixed time intervals; much in the same way ADAMS received from AMESim all information stemming from the hydraulic model. Data exchange evolved at each time interval, this being designated as the “communication interval “. When either AMESim (or ADAMS) received a value processed by the companion software, the specific information remained constant within the extent of the communication interval.
In figure 1 the pump model in AMESim with ADAMS co-simulation interface submodel is shown.
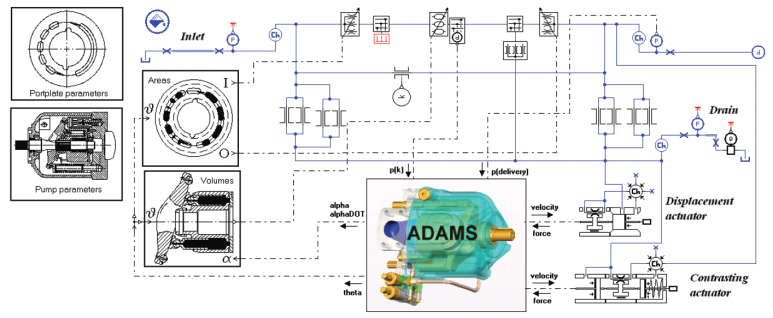 Figure 1
Figure 1
Figure 2 presents shaft torque and delivery pressure time histories, the latter being an input to the ADAMS model. Shaft torque obtained via the multibody model closely matches traditional results: in both cases and up to t = 0.35 s the torque increases with pressure and is thereafter held almost constant due to the torque limiter control that causes swashplate tilt to decrease (at t = 0.35 s shaft torque is equal to the torque limiter setting). When delivery pressure reaches the absolute pressure limiter setting (at t = 0.8 s) torque is decreased further.
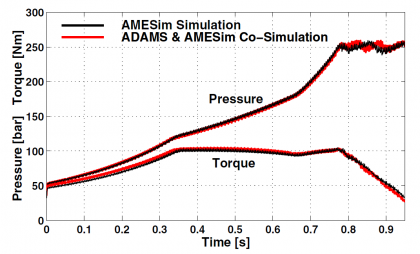 Figure 2
Figure 2
Figure 3 details a comparison between experimental and simulated steady-state characteristic for swashplate tilt.
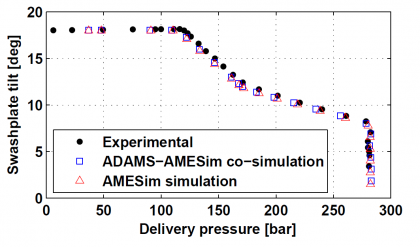 Figure 3
Figure 3
More details are available in:
ROCCATELLO A, MANCO’ S, NERVEGNA N, 2007: Modelling a Variable Displacement Axial Piston Pump ...