-
 Publications
Publications
-
 Research activities
Research activities
-
 Hybrid mobile hydraulics for excavators
Hybrid mobile hydraulics for excavators
-
Lubricating Systems with Rotating Shafts
-
0D models of axial piston pumps/motors
-
CFD studies on conical poppet valves
-
CFD analysis of gerotor pumps
-
Lumped parameter models of crescent pumps
-
Lumped parameter models of vane pumps
-
Lumped parameter models of gerotor pumps
-
Coupled simulation of telehandler hydraulics
-
Modelling of brake booster vacuum pumps
-
Absorbed energy in ICE lubricating pumps
-
Multi-body simulation of axial piston pumps
-
Development of variable flow lubricating pumps
-
Optimization of ICE lubrication gerotor pumps
-
-
Research projects
Energy analysis of hybrid energy-efficient mobile hydraulics for excavators
Improving energy efficiency in mobile hydraulics is critical for both environmental and economic reasons. A promising approach involves electrifying machines, where electric motors drive hydraulic pumps coupled to actuators. This setup eliminates flow control valves and enables energy recovery. However, for medium- to high-power applications, all the power managed by the hydraulic linear actuators would need to pass through the electric machines, requiring high-power motors and large onboard electricity generation—an impractical solution.
Therefore, this study applies the concept of splitting the power transferred to and from the actuator between the hydraulic and electrical domains to a hydraulic excavator arm, involving a centralized hydraulic power supply. The objective is to reduce the power rating of the electrical components while maintaining the high power capability of the hydraulic actuator.
The reference vehicle for this study is a 9-ton commercial excavator with an installed power of approximately 50 kW. The hydraulic circuit powers five linear actuators, shown in Figure 1, and three hydraulic motors for the two tracks and the cabin swing. The circuit operates on the principle of load sensing with flow sharing. Simulations were carried out in the Simcenter Amesim® 2021.1 environment, and the arm kinematics was modeled using the 2D Mechanical library.
Figure 1 shows the main actuators of the excavator.
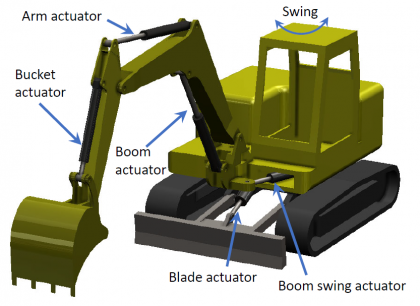 Figure 1
Figure 1
The excavator reference model was validated through experimental tests. The test cycles involved individually supplying each directional control valve with the maximum positive and negative command signals corresponding to the movement of the respective actuator. The pump delivery pressure and flow rate were measured and engine speed was also recorded.
In the new hybrid circuit (Figure 2), the internal combustion engine drives an electric generator and a fixed-displacement pump, PU1. The generator charges a supercapacitor battery, which in turn powers four electric motors. One motor drives the cabin rotation directly (swing supercomponent), while the other three drive corresponding motor-pumps connected to actuators (electro-hydraulic modules EH1, EH2, EH3). The fixed-displacement pump, together with a gas-charged hydraulic accumulator, maintains the pressure in the common rail line within a range, ensuring the hydraulic circuit receives an approximately constant supply pressure. Depending on the load on each actuator, the motor-pump can function as either a pump or a motor, exchanging energy with both the hydraulic and the electric circuits.
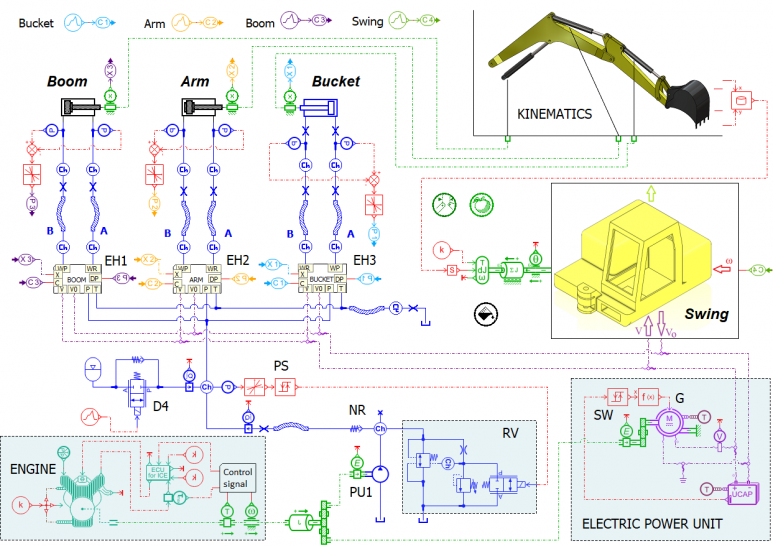 Figure 2
Figure 2
Different architectures were evaluated during a digging cycle based on the JCMAS standard.
The results demonstrated the expected system operation and efficiency benefits. Depending on the layout, fuel savings ranged from 28% to 38% compared to the original excavator. Nearly 60% of the energy is transferred to the actuators hydraulically, minimizing the power rating required for the electric machines and thus improving system cost-effectiveness and compactness. Moreover, the proposed hybrid design is generally applicable, being modular, scalable, and suitable for different hydraulic machines.
Figure 3 shows the cumulative energy managed by the electro-hydraulic modules (EH) during the digging cycle. Positive values represent energy supplied to the actuators, while negative values indicate energy received from the actuators.
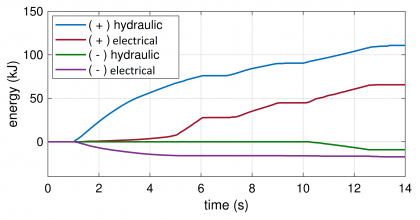 Figure 3
Figure 3
More analyses and details are available in:
PADOVANI D, RUNDO M, ALTARE G, 2020: The Working Hydraulics of Valve-Controlled Mobile Machines: ...
ALTARE G, PADOVANI D, NERVEGNA N, 2013: A Close-up View of a Load Sensing "Hybrid" PDCV